
使用iRVision 2.5D允许机器人只借助一个普通2D相机来拾取码放堆集的目标。

iRVision 视觉堆垛程序_1
(从寄存器R提取Z轴偏移)
此功能通过视觉计算寻找目标的2D位置和指定的寄存器数值,并引导机器人的运动补偿目标的偏移,不但包括X轴,Y轴和X-Y平面旋转度R,也同时包括Z轴。
寄存器R被用作存储已知的目标Z轴高度,或者通过距离传感器检测出的Z轴高度信息。

iRVision 视觉堆垛程序_2
(从堆垛层数提取Z轴偏移)
此功能通过视觉结合视觉检测结果和根据目标比例确定的目标层数(目标高度)计算目标的位置。目标层数依照参考比例和高度数据自动确定,因而,即使在视觉检测中存在细微的比例误差,也可以通过一个离散的层数(目标高度)来计算目标的具体位置。

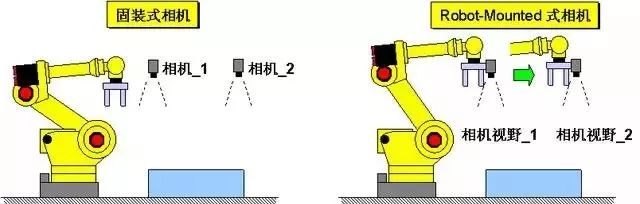
iRVision 2DV 复数视野功能
2D复数视野程序提供通过若干固装式照相机定位大型目标的能力,对通过Robot-Mounted式照相机进行检测同样有效。
iRVision 3DL 复数视野功能
3D复数视野程序提供通过若干固装式3D照相机定位大型目标的能力,对通过Robot-Mounted式照相机进行检测同样有效。

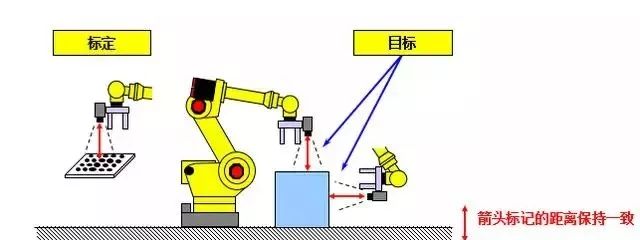
iRVision 浮动坐标系功能
(Floating Frame)
Robot-mounted 式照相机的标定可以用于如下图所示任意位置和方向下的iRVision程序。2D状态下的移动补偿与照相机实际位置相关联。照相机的标定可以在任意位置下进行。减少示教工作量。
iRVision 3DL LED 光源控制
此功能支持在3DL视觉程序中,在捕获2D图象和激光照射图象时,同步控制LED光源的ON/OFF。通过此功能,可以获得适当的外部光线环境,提升整个视觉系统的能力。

iRVision 自动曝光功能
根据周围环境光线强度的变化,iRVision将自动调节曝光时间,以取得和示教良好图象类似的成像效果,全天候运行可能。

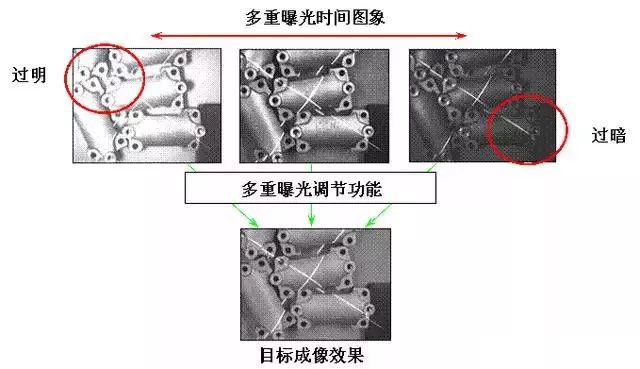
iRVision 多重曝光功能
通过多个不同曝光时间的成像,选择一个接近示教效果的成像,以取得一个具有宽泛的、动态的曝光范围和成像效果。此功能在环境光线变化强烈时会有较好的效果。
iRVision 环形网络功能
(Robot Ring)
通过此功能,未附有 iRVision 视觉系统的机器人可以通过网络调用附有 iRVision 视觉系统的机器人的偏移检测数据。

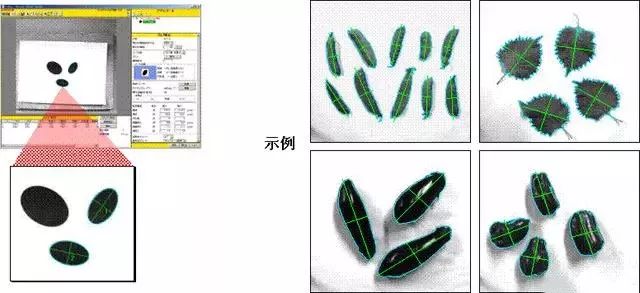
iRVision 斑点检测功能
(Blob Locator Tool)
在成像范围内检测与示教模型具有相似特性(如周长、曲率等)的二元(黑白)目标位置。与条件检测(Conditional execution tool)同时使用,可以应用于目标排列和品质检测等多种场合。
iRVision 灰度检测功能
(Histogram Tool)
在指定区域内检测光线强度(成像灰度),且计算多种特性例如平均数、*大值、*小值等。与条件检测(Conditional execution tool)同时使用,可以对应目标排列和目标在位检测等多种场合。
此功能等同 V-500iA/2DV 中 Associate tool。
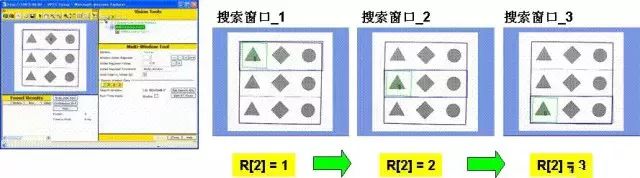
iRVision 多窗口检测功能
(Multi-Window Tool
通过机器人控制器内寄存器R的数值变化切换对应的预设搜索窗口。
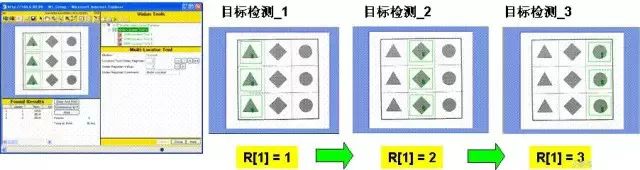
iRVision 多目标检测功能
(Multi-Locator Tool)
通过机器人控制器内寄存器R的数值变化切换对应的预设目标视觉程序。
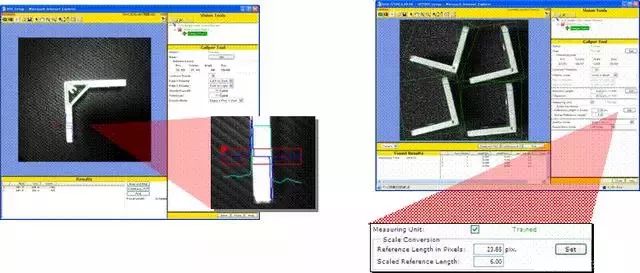
iRVision 长度计测功能
(Caliper Tool)
对应指定区域,侦测目标边缘并测量两条边缘间长度(单位:像素pixel),乘以转换因子可以换算为mm。可以对应目标排列及品质检测等应用场合。
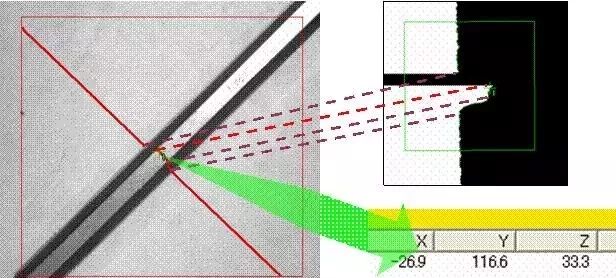
iRVision 截面检测功能
(Cross Section)
侦测目标的局部3D特性,显示沿激光衍条照射路径上的目标截面形状。对在3D视觉程序中因2D成像缺乏有效的特征量而无法进行准确定位时会比较有效。
iRVision 子检测功能
(Child Tool)
允许在一个父目标检测(GPM locator tool)下添加一个子目标检测(GPM locator tool)构成二级检测目录。子检测将根据父检测的结果进行动态的判定。与条件检测(Conditional execution tool)同时使用,可以对应目标排列和目标在位检测等多种场合。
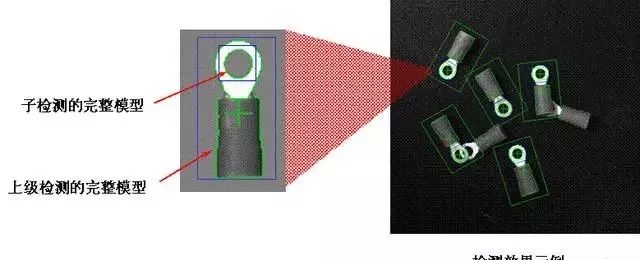
iRVision 定位调整功能
(Position Adjust Tool)
依据子检测的结果,对应目标表面明显特征(如孔,键槽)调整父检测的定位位置,获得更精确的偏移和旋转数据。对不能以整个示教模型进行方向性定位的应用较有效。对一个上级检测,可以使用多个下级子检测来分析目标的多种局部特性。

iRVision 曲面匹配功能
(Curved Surface Matching Tool)
通过目标表面阶梯状的光线强度分布(亮或暗,模型内显示为不同颜色)来检测曲面目标的偏移与旋转。识别全圆形物体可能。

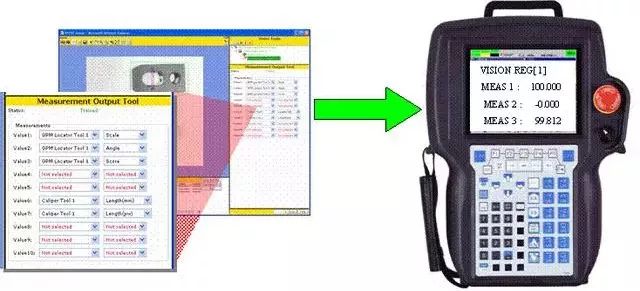
iRVision 计测输出功能
(Measurement Output Tool)
输出测量数值(Locator tool中的”Score/分值“、”Size/比例“,Caliper tool中的”Length/长度“等)至视觉寄存器VR。这些数据可以复制至机器人数据寄存器R并在TP程序中自由调用。
iRVision 视觉替换功能
( Vision Shift)
通过视觉程序调整机器人TP程序以对应实际的工件位置,只需在机器人手爪端添加一台相机即可执行此功能。固定工件上的3处任意的参考点的位置数据将被自动检测并计算出补偿数据。在离线编程或机器人系统搬迁后,使用此功能可极大减少机器人重新示教的时间。
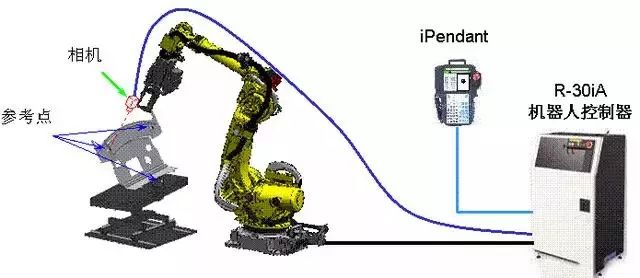
iRVision 视觉零位功能
( Vision Mastering)
通过视觉程序补偿机器人J2~J5轴的零位数据,只需在机器人手爪端添加一台相机即可执行此功能。机器人变换不同的姿态,相机与确定目标点间的相对位置数据将被自动检测并计算补偿数据。此功能可应用于提升机器人TCP示教准确性,Vision shift 离线编程和其他视觉应用。
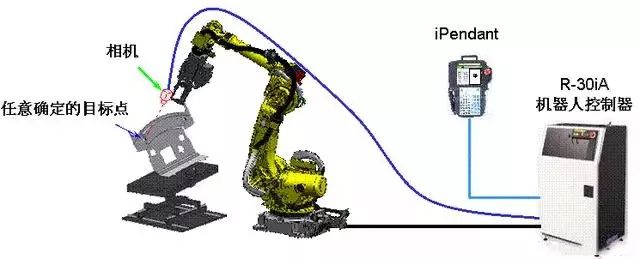
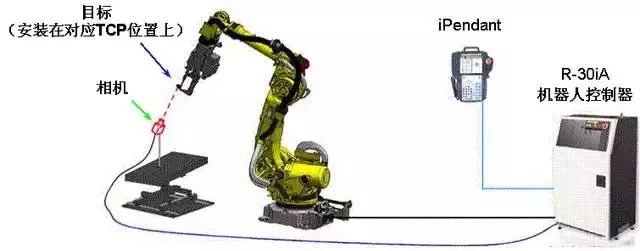
iRVision 视觉坐标系设置功能_1
( Vision Frame Set)
通过视觉程序设置机器人TCP,只需在机器人手爪端TCP对应位置添加一台相机即可执行此功能。机器人变换不同的姿态,基于对应用户坐标系下相机与目标点间的相对位置数据将被自动检测并计算机器人对应TCP。此功能可提升TCP示教的速度和精确性。
iRVision 视觉坐标系设置功能_2
( Vision Frame Set)
坐标系设置的另一种功能:通过视觉设置一个与视觉标定板对等的用户坐标系。通过装置在机器人手爪末端的相机,用户坐标系UF设置在视觉标定板的原点位置(四点法),或当视觉标定板装置在机器人手爪末端,则工具坐标系UT设置在视觉标定板的原点位置(六点法)。

服务热线


